Unsupervised Learning#
This section marks our journey into another significant domain of machine learning and AI: unsupervised learning. Rather than delving deep into theoretical intricacies, our focus here will be on offering a practical guide. We aim to equip you with a clear understanding and effective tools for employing unsupervised learning methods in real-world (EO) scenarios.
It’s important to note that, while unsupervised learning encompasses a broad range of applications, our discussion will predominantly revolve around classification tasks. This is because unsupervised learning techniques are exceptionally adept at identifying patterns and categorising data when the classifications are not explicitly labeled. By exploring these techniques, you’ll gain insights into how to discern structure and relationships within your datasets, even in the absence of predefined categories or labels.
The tasks in this notebook will be mainly two:
Discrimination of Sea ice and lead based on image classification based on Sentinel-2 optical data.
Discrimination of Sea ice and lead based on altimetry data classification based on Sentinel-3 altimetry data.
Introduction to Unsupervised Learning Methods [Bishop and Nasrabadi, 2006]#
Introduction to K-means Clustering#
K-means clustering is a type of unsupervised learning algorithm used for partitioning a dataset into a set of k groups (or clusters), where k represents the number of groups pre-specified by the analyst. It classifies the data points based on the similarity of the features of the data [MacQueen and others, 1967]. The basic idea is to define k centroids, one for each cluster, and then assign each data point to the nearest centroid, while keeping the centroids as small as possible.
Why K-means for Clustering?#
K-means clustering is particularly well-suited for applications where:
The structure of the data is not known beforehand: K-means doesn’t require any prior knowledge about the data distribution or structure, making it ideal for exploratory data analysis.
Simplicity and scalability: The algorithm is straightforward to implement and can scale to large datasets relatively easily.
Key Components of K-means#
Choosing K: The number of clusters (k) is a parameter that needs to be specified before applying the algorithm.
Centroids Initialization: The initial placement of the centroids can affect the final results.
Assignment Step: Each data point is assigned to its nearest centroid, based on the squared Euclidean distance.
Update Step: The centroids are recomputed as the center of all the data points assigned to the respective cluster.
The Iterative Process of K-means#
The assignment and update steps are repeated iteratively until the centroids no longer move significantly, meaning the within-cluster variation is minimised. This iterative process ensures that the algorithm converges to a result, which might be a local optimum.
Advantages of K-means#
Efficiency: K-means is computationally efficient.
Ease of interpretation: The results of k-means clustering are easy to understand and interpret.
Basic Code Implementation#
Below, you’ll find a basic implementation of the K-means clustering algorithm. This serves as a foundational understanding and a starting point for applying the algorithm to your specific data analysis tasks.
from google.colab import drive
drive.mount('/content/drive')
Mounted at /content/drive
pip install rasterio
Requirement already satisfied: rasterio in /usr/local/lib/python3.12/dist-packages (1.5.0)
Requirement already satisfied: affine in /usr/local/lib/python3.12/dist-packages (from rasterio) (2.4.0)
Requirement already satisfied: attrs in /usr/local/lib/python3.12/dist-packages (from rasterio) (25.4.0)
Requirement already satisfied: certifi in /usr/local/lib/python3.12/dist-packages (from rasterio) (2026.1.4)
Requirement already satisfied: click!=8.2.*,>=4.0 in /usr/local/lib/python3.12/dist-packages (from rasterio) (8.3.1)
Requirement already satisfied: cligj>=0.5 in /usr/local/lib/python3.12/dist-packages (from rasterio) (0.7.2)
Requirement already satisfied: numpy>=2 in /usr/local/lib/python3.12/dist-packages (from rasterio) (2.0.2)
Requirement already satisfied: pyparsing in /usr/local/lib/python3.12/dist-packages (from rasterio) (3.3.2)
pip install netCDF4
Collecting netCDF4
Downloading netcdf4-1.7.4-cp311-abi3-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl.metadata (2.1 kB)
Collecting cftime (from netCDF4)
Downloading cftime-1.6.5-cp312-cp312-manylinux2014_x86_64.manylinux_2_17_x86_64.whl.metadata (8.7 kB)
Requirement already satisfied: certifi in /usr/local/lib/python3.12/dist-packages (from netCDF4) (2026.1.4)
Requirement already satisfied: numpy>=1.21.2 in /usr/local/lib/python3.12/dist-packages (from netCDF4) (2.0.2)
Downloading netcdf4-1.7.4-cp311-abi3-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl (10.1 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 10.1/10.1 MB 94.0 MB/s eta 0:00:00
?25hDownloading cftime-1.6.5-cp312-cp312-manylinux2014_x86_64.manylinux_2_17_x86_64.whl (1.6 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 1.6/1.6 MB 101.5 MB/s eta 0:00:00
?25hInstalling collected packages: cftime, netCDF4
Successfully installed cftime-1.6.5 netCDF4-1.7.4
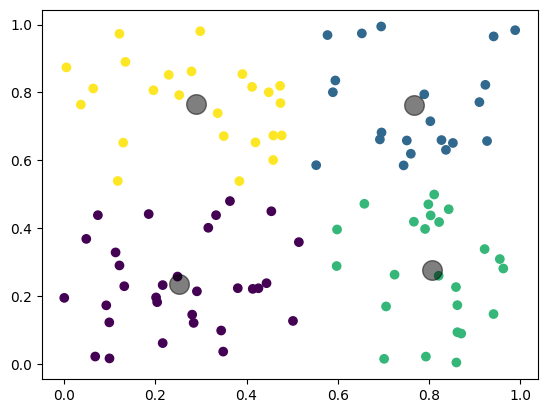
# Python code for K-means clustering
from sklearn.cluster import KMeans
import matplotlib.pyplot as plt
import numpy as np
# Sample data
X = np.random.rand(100, 2)
# K-means model
kmeans = KMeans(n_clusters=4)
kmeans.fit(X)
y_kmeans = kmeans.predict(X)
# Plotting
plt.scatter(X[:, 0], X[:, 1], c=y_kmeans, cmap='viridis')
centers = kmeans.cluster_centers_
plt.scatter(centers[:, 0], centers[:, 1], c='black', s=200, alpha=0.5)
plt.show()
Gaussian Mixture Models (GMM) [Bishop and Nasrabadi, 2006]#
Introduction to Gaussian Mixture Models#
Gaussian Mixture Models (GMM) are a probabilistic model for representing normally distributed subpopulations within an overall population. The model assumes that the data is generated from a mixture of several Gaussian distributions, each with its own mean and variance [Reynolds and others, 2009]. GMMs are widely used for clustering and density estimation, as they provide a method for representing complex distributions through the combination of simpler ones.
Why Gaussian Mixture Models for Clustering?#
Gaussian Mixture Models are particularly powerful in scenarios where:
Soft clustering is needed: Unlike K-means, GMM provides the probability of each data point belonging to each cluster, offering a soft classification and understanding of the uncertainties in our data.
Flexibility in cluster covariance: GMM allows for clusters to have different sizes and different shapes, making it more flexible to capture the true variance in the data.
Key Components of GMM#
Number of Components (Gaussians): Similar to K in K-means, the number of Gaussians (components) is a parameter that needs to be set.
Expectation-Maximization (EM) Algorithm: GMMs use the EM algorithm for fitting, iteratively improving the likelihood of the data given the model.
Covariance Type: The shape, size, and orientation of the clusters are determined by the covariance type of the Gaussians (e.g., spherical, diagonal, tied, or full covariance).
The EM Algorithm in GMM#
The Expectation-Maximization (EM) algorithm is a two-step process:
Expectation Step (E-step): Calculate the probability that each data point belongs to each cluster.
Maximization Step (M-step): Update the parameters of the Gaussians (mean, covariance, and mixing coefficient) to maximize the likelihood of the data given these assignments.
This process is repeated until convergence, meaning the parameters do not significantly change from one iteration to the next.
Advantages of GMM#
Soft Clustering: Provides a probabilistic framework for soft clustering, giving more information about the uncertainties in the data assignments.
Cluster Shape Flexibility: Can adapt to ellipsoidal cluster shapes, thanks to the flexible covariance structure.
Basic Code Implementation#
Below, you’ll find a basic implementation of the Gaussian Mixture Model. This should serve as an initial guide for understanding the model and applying it to your data analysis projects.
from sklearn.mixture import GaussianMixture
import matplotlib.pyplot as plt
import numpy as np
# Sample data
X = np.random.rand(100, 2)
# GMM model
gmm = GaussianMixture(n_components=3)
gmm.fit(X)
y_gmm = gmm.predict(X)
# Plotting
plt.scatter(X[:, 0], X[:, 1], c=y_gmm, cmap='viridis')
centers = gmm.means_
plt.scatter(centers[:, 0], centers[:, 1], c='black', s=200, alpha=0.5)
plt.title('Gaussian Mixture Model')
plt.show()
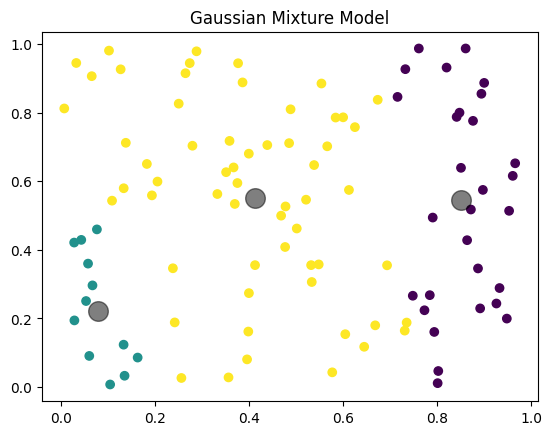
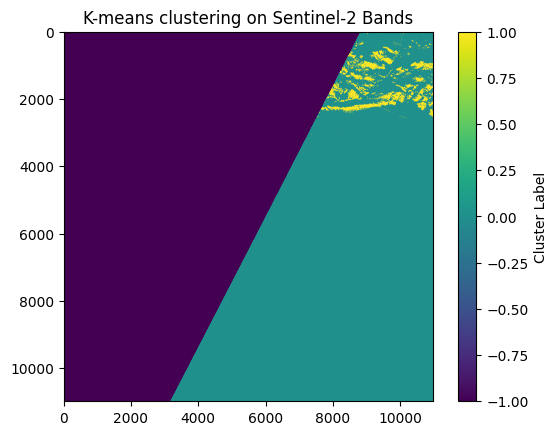
Image Classification#
Now, let’s explore the application of these unsupervised methods to image classification tasks, focusing specifically on distinguishing between sea ice and leads in Sentinel-2 imagery.
K-Means Implementation#
import rasterio
import numpy as np
from sklearn.cluster import KMeans
import matplotlib.pyplot as plt
base_path = "/content/drive/MyDrive/PhD Year 3/GEOL0069_test_2026/Week 4/Unsupervised Learning/S2A_MSIL1C_20190301T235611_N0207_R116_T01WCU_20190302T014622.SAFE/GRANULE/L1C_T01WCU_A019275_20190301T235610/IMG_DATA/" # You need to specify the path
bands_paths = {
'B4': base_path + 'T01WCU_20190301T235611_B04.jp2',
'B3': base_path + 'T01WCU_20190301T235611_B03.jp2',
'B2': base_path + 'T01WCU_20190301T235611_B02.jp2'
}
# Read and stack the band images
band_data = []
for band in ['B4']:
with rasterio.open(bands_paths[band]) as src:
band_data.append(src.read(1))
# Stack bands and create a mask for valid data (non-zero values in all bands)
band_stack = np.dstack(band_data)
valid_data_mask = np.all(band_stack > 0, axis=2)
# Reshape for K-means, only including valid data
X = band_stack[valid_data_mask].reshape((-1, 1))
# K-means clustering
kmeans = KMeans(n_clusters=2, random_state=0).fit(X)
labels = kmeans.labels_
# Create an empty array for the result, filled with a no-data value (e.g., -1)
labels_image = np.full(band_stack.shape[:2], -1, dtype=int)
# Place cluster labels in the locations corresponding to valid data
labels_image[valid_data_mask] = labels
# Plotting the result
plt.imshow(labels_image, cmap='viridis')
plt.title('K-means clustering on Sentinel-2 Bands')
plt.colorbar(label='Cluster Label')
plt.show()
del kmeans, labels, band_data, band_stack, valid_data_mask, X, labels_image
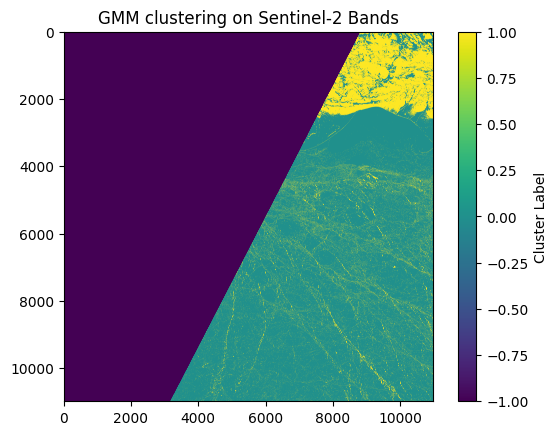
GMM Implementation#
import rasterio
import numpy as np
from sklearn.mixture import GaussianMixture
import matplotlib.pyplot as plt
# Paths to the band images
base_path = "/content/drive/MyDrive/PhD Year 3/GEOL0069_test_2026/Week 4/Unsupervised Learning/S2A_MSIL1C_20190301T235611_N0207_R116_T01WCU_20190302T014622.SAFE/GRANULE/L1C_T01WCU_A019275_20190301T235610/IMG_DATA/" # You need to specify the path
bands_paths = {
'B4': base_path + 'T01WCU_20190301T235611_B04.jp2',
'B3': base_path + 'T01WCU_20190301T235611_B03.jp2',
'B2': base_path + 'T01WCU_20190301T235611_B02.jp2'
}
# Read and stack the band images
band_data = []
for band in ['B4']:
with rasterio.open(bands_paths[band]) as src:
band_data.append(src.read(1))
# Stack bands and create a mask for valid data (non-zero values in all bands)
band_stack = np.dstack(band_data)
valid_data_mask = np.all(band_stack > 0, axis=2)
# Reshape for GMM, only including valid data
X = band_stack[valid_data_mask].reshape((-1, 1))
# GMM clustering
gmm = GaussianMixture(n_components=2, random_state=0).fit(X)
labels = gmm.predict(X)
# Create an empty array for the result, filled with a no-data value (e.g., -1)
labels_image = np.full(band_stack.shape[:2], -1, dtype=int)
# Place GMM labels in the locations corresponding to valid data
labels_image[valid_data_mask] = labels
# Plotting the result
plt.imshow(labels_image, cmap='viridis')
plt.title('GMM clustering on Sentinel-2 Bands')
plt.colorbar(label='Cluster Label')
plt.show()
Altimetry Classification#
Now, let’s explore the application of these unsupervised methods to altimetry classification tasks, focusing specifically on distinguishing between sea ice and leads in Sentinel-3 altimetry dataset.
Read in Functions Needed#
Before delving into the modeling process, it’s crucial to preprocess the data to ensure compatibility with our analytical models. This involves transforming the raw data into meaningful variables, such as peakniness and stack standard deviation (SSD), etc.
#
from netCDF4 import Dataset
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import griddata
import numpy.ma as ma
import glob
from matplotlib.patches import Polygon
import scipy.spatial as spatial
from scipy.spatial import KDTree
from sklearn.cluster import KMeans, DBSCAN
from sklearn.preprocessing import StandardScaler,MinMaxScaler
from sklearn.mixture import GaussianMixture
from scipy.cluster.hierarchy import linkage, fcluster
#=========================================================================================================
#=================================== SUBFUNCTIONS ======================================================
#=========================================================================================================
#*args and **kwargs allow you to pass an unspecified number of arguments to a function,
#so when writing the function definition, you do not need to know how many arguments will be passed to your function
#**kwargs allows you to pass keyworded variable length of arguments to a function.
#You should use **kwargs if you want to handle named arguments in a function.
#double star allows us to pass through keyword arguments (and any number of them).
def peakiness(waves, **kwargs):
"finds peakiness of waveforms."
#print("Beginning peakiness")
# Kwargs are:
# wf_plots. specify a number n: wf_plots=n, to show the first n waveform plots. \
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
import time
print("Running peakiness function...")
size=np.shape(waves)[0] #.shape property is a tuple of length .ndim containing the length of each dimensions
#Tuple of array dimensions.
waves1=np.copy(waves)
if waves1.ndim == 1: #number of array dimensions
print('only one waveform in file')
waves2=waves1.reshape(1,np.size(waves1)) #numpy.reshape(a, newshape, order='C'), a=array to be reshaped
waves1=waves2
# *args is used to send a non-keyworded variable length argument list to the function
def by_row(waves, *args):
"calculate peakiness for each waveform"
maximum=np.nanmax(waves)
if maximum > 0:
maximum_bin=np.where(waves==maximum)
#print(maximum_bin)
maximum_bin=maximum_bin[0][0]
waves_128=waves[maximum_bin-50:maximum_bin+78]
waves=waves_128
noise_floor=np.nanmean(waves[10:20])
where_above_nf=np.where(waves > noise_floor)
if np.shape(where_above_nf)[1] > 0:
maximum=np.nanmax(waves[where_above_nf])
total=np.sum(waves[where_above_nf])
mean=np.nanmean(waves[where_above_nf])
peaky=maximum/mean
else:
peaky = np.nan
maximum = np.nan
total = np.nan
else:
peaky = np.nan
maximum = np.nan
total = np.nan
if 'maxs' in args:
return maximum
if 'totals' in args:
return total
if 'peaky' in args:
return peaky
peaky=np.apply_along_axis(by_row, 1, waves1, 'peaky') #numpy.apply_along_axis(func1d, axis, arr, *args, **kwargs)
if 'wf_plots' in kwargs:
maximums=np.apply_along_axis(by_row, 1, waves1, 'maxs')
totals=np.apply_along_axis(by_row, 1, waves1, 'totals')
for i in range(0,kwargs['wf_plots']):
if i == 0:
print("Plotting first "+str(kwargs['wf_plots'])+" waveforms")
plt.plot(waves1[i,:])#, a, col[i],label=label[i])
plt.axhline(maximums[i], color='green')
plt.axvline(10, color='r')
plt.axvline(19, color='r')
plt.xlabel('Bin (of 256)')
plt.ylabel('Power')
plt.text(5,maximums[i],"maximum="+str(maximums[i]))
plt.text(5,maximums[i]-2500,"total="+str(totals[i]))
plt.text(5,maximums[i]-5000,"peakiness="+str(peaky[i]))
plt.title('waveform '+str(i)+' of '+str(size)+'\n. Noise floor average taken between red lines.')
plt.show()
return peaky
#=========================================================================================================
#=========================================================================================================
#=========================================================================================================
def unpack_gpod(variable):
from scipy.interpolate import interp1d
time_1hz=SAR_data.variables['time_01'][:]
time_20hz=SAR_data.variables['time_20_ku'][:]
time_20hzC = SAR_data.variables['time_20_c'][:]
out=(SAR_data.variables[variable][:]).astype(float) # convert from integer array to float.
#if ma.is_masked(dataset.variables[variable][:]) == True:
#print(variable,'is masked. Removing mask and replacing masked values with nan')
out=np.ma.filled(out, np.nan)
if len(out)==len(time_1hz):
print(variable,'is 1hz. Expanding to 20hz...')
out = interp1d(time_1hz,out,fill_value="extrapolate")(time_20hz)
if len(out)==len(time_20hzC):
print(variable, 'is c band, expanding to 20hz ku band dimension')
out = interp1d(time_20hzC,out,fill_value="extrapolate")(time_20hz)
return out
#=========================================================================================================
#=========================================================================================================
#=========================================================================================================
def calculate_SSD(RIP):
from scipy.optimize import curve_fit
# from scipy import asarray as ar,exp
from numpy import asarray as ar, exp
do_plot='Off'
def gaussian(x,a,x0,sigma):
return a * np.exp(-(x - x0)**2 / (2 * sigma**2))
SSD=np.zeros(np.shape(RIP)[0])*np.nan
x=np.arange(np.shape(RIP)[1])
for i in range(np.shape(RIP)[0]):
y=np.copy(RIP[i])
y[(np.isnan(y)==True)]=0
if 'popt' in locals():
del(popt,pcov)
SSD_calc=0.5*(np.sum(y**2)*np.sum(y**2)/np.sum(y**4))
#print('SSD calculated from equation',SSD)
#n = len(x)
mean_est = sum(x * y) / sum(y)
sigma_est = np.sqrt(sum(y * (x - mean_est)**2) / sum(y))
#print('est. mean',mean,'est. sigma',sigma_est)
try:
popt,pcov = curve_fit(gaussian, x, y, p0=[max(y), mean_est, sigma_est],maxfev=10000)
except RuntimeError as e:
print("Gaussian SSD curve-fit error: "+str(e))
#plt.plot(y)
#plt.show()
except TypeError as t:
print("Gaussian SSD curve-fit error: "+str(t))
if do_plot=='ON':
plt.plot(x,y)
plt.plot(x,gaussian(x,*popt),'ro:',label='fit')
plt.axvline(popt[1])
plt.axvspan(popt[1]-popt[2], popt[1]+popt[2], alpha=0.15, color='Navy')
plt.show()
print('popt',popt)
print('curve fit SSD',popt[2])
if 'popt' in locals():
SSD[i]=abs(popt[2])
return SSD
path = '/content/drive/MyDrive/PhD Year 3/GEOL0069_test_2026/Week 4/Unsupervised Learning/'
SAR_file = 'S3A_SR_2_LAN_SI_20190307T005808_20190307T012503_20230527T225016_1614_042_131______LN3_R_NT_005.SEN3'
SAR_data = Dataset(path + SAR_file + '/enhanced_measurement.nc')
SAR_lat = unpack_gpod('lat_20_ku')
SAR_lon = unpack_gpod('lon_20_ku')
waves = unpack_gpod('waveform_20_ku')
sig_0 = unpack_gpod('sig0_water_20_ku')
RIP = unpack_gpod('rip_20_ku')
flag = unpack_gpod('surf_type_class_20_ku')
# Filter out bad data points using criteria (here, lat >= -99999)
find = np.where(SAR_lat >= -99999)
SAR_lat = SAR_lat[find]
SAR_lon = SAR_lon[find]
waves = waves[find]
sig_0 = sig_0[find]
RIP = RIP[find]
# Calculate additional features
PP = peakiness(waves)
SSD = calculate_SSD(RIP)
# Convert to numpy arrays (if not already)
sig_0_np = np.array(sig_0)
PP_np = np.array(PP)
SSD_np = np.array(SSD)
# Create data matrix
data = np.column_stack((sig_0_np, PP_np, SSD_np))
# Standardize the data
scaler = StandardScaler()
data_normalized = scaler.fit_transform(data)
Running peakiness function...
/tmp/ipython-input-448542667.py:63: RuntimeWarning: Mean of empty slice
noise_floor=np.nanmean(waves[10:20])
Gaussian SSD curve-fit error: Optimal parameters not found: Number of calls to function has reached maxfev = 10000.
Gaussian SSD curve-fit error: Optimal parameters not found: Number of calls to function has reached maxfev = 10000.
Gaussian SSD curve-fit error: Optimal parameters not found: Number of calls to function has reached maxfev = 10000.
There are some NaN values in the dataset so one way to deal with this is to delete them.
# Remove any rows that contain NaN values
nan_count = np.isnan(data_normalized).sum()
print(f"Number of NaN values in the array: {nan_count}")
data_cleaned = data_normalized[~np.isnan(data_normalized).any(axis=1)]
mask = ~np.isnan(data_normalized).any(axis=1)
waves_cleaned = np.array(waves)[mask]
flag_cleaned = np.array(flag)[mask]
data_cleaned = data_cleaned[(flag_cleaned==1)|(flag_cleaned==2)]
waves_cleaned = waves_cleaned[(flag_cleaned==1)|(flag_cleaned==2)]
flag_cleaned = flag_cleaned[(flag_cleaned==1)|(flag_cleaned==2)]
Number of NaN values in the array: 1283
Now, let’s proceed with running the GMM model as usual. Remember, you have the flexibility to substitute this with K-Means or any other preferred model.
gmm = GaussianMixture(n_components=2, random_state=0)
gmm.fit(data_cleaned)
clusters_gmm = gmm.predict(data_cleaned)
We can also inspect how many data points are there in each class of your clustering prediction.
unique, counts = np.unique(clusters_gmm, return_counts=True)
class_counts = dict(zip(unique, counts))
print("Cluster counts:", class_counts)
Cluster counts: {np.int64(0): np.int64(8880), np.int64(1): np.int64(3315)}
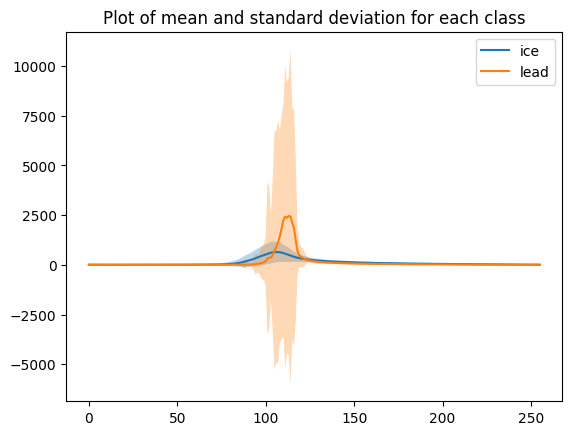
We can plot the mean waveform of each class.
# mean and standard deviation for all echoes
mean_ice = np.mean(waves_cleaned[clusters_gmm==0],axis=0)
std_ice = np.std(waves_cleaned[clusters_gmm==0], axis=0)
plt.plot(mean_ice, label='ice')
plt.fill_between(range(len(mean_ice)), mean_ice - std_ice, mean_ice + std_ice, alpha=0.3)
mean_lead = np.mean(waves_cleaned[clusters_gmm==1],axis=0)
std_lead = np.std(waves_cleaned[clusters_gmm==1], axis=0)
plt.plot(mean_lead, label='lead')
plt.fill_between(range(len(mean_lead)), mean_lead - std_lead, mean_lead + std_lead, alpha=0.3)
plt.title('Plot of mean and standard deviation for each class')
plt.legend()
<matplotlib.legend.Legend at 0x78fa459e8470>
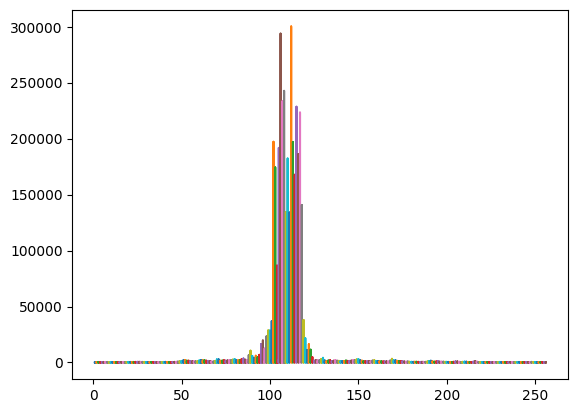
x = np.stack([np.arange(1,waves_cleaned.shape[1]+1)]*waves_cleaned.shape[0])
plt.plot(x,waves_cleaned) # plot of all the echos
plt.show()
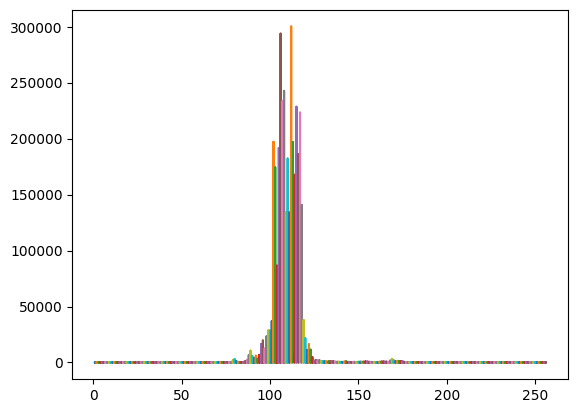
# plot echos for the lead cluster
x = np.stack([np.arange(1,waves_cleaned[clusters_gmm==1].shape[1]+1)]*waves_cleaned[clusters_gmm==1].shape[0])
plt.plot(x,waves_cleaned[clusters_gmm==1]) # plot of all the echos
plt.show()
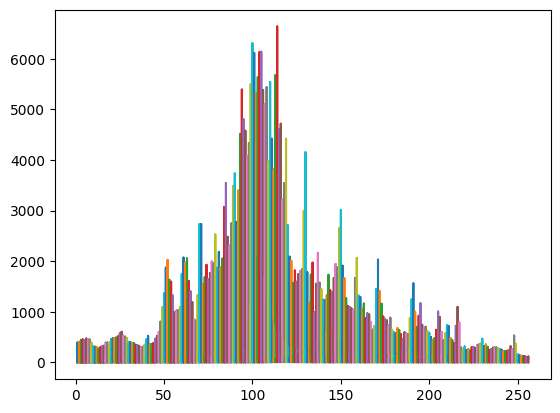
# plot echos for the sea ice cluster
x = np.stack([np.arange(1,waves_cleaned[clusters_gmm==0].shape[1]+1)]*waves_cleaned[clusters_gmm==0].shape[0])
plt.plot(x,waves_cleaned[clusters_gmm==0]) # plot of all the echos
plt.show()
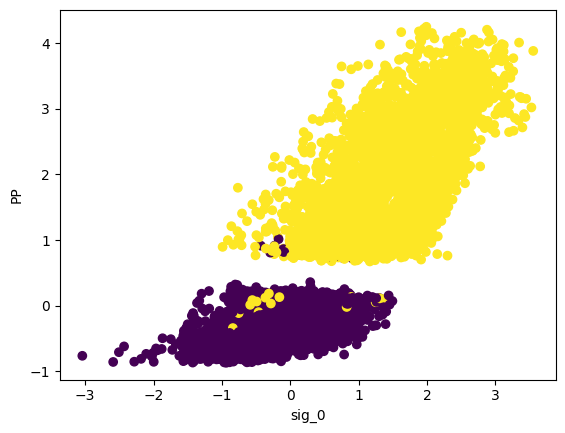
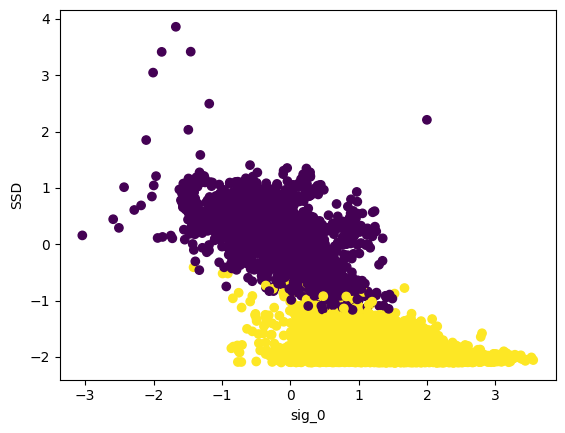
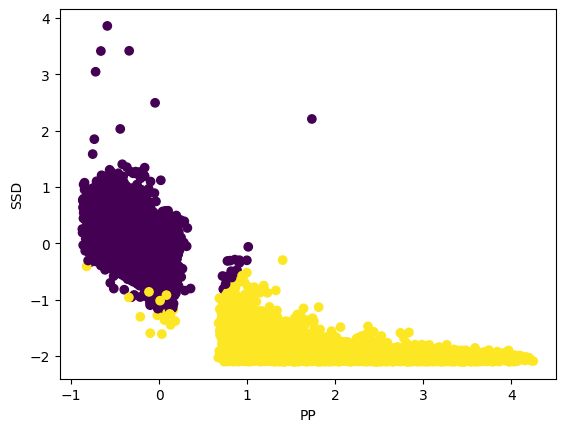
Scatter Plots of Clustered Data#
This code visualizes the clustering results using scatter plots, where different colors represent different clusters (clusters_gmm).
plt.scatter(data_cleaned[:,0],data_cleaned[:,1],c=clusters_gmm)
plt.xlabel("sig_0")
plt.ylabel("PP")
plt.show()
plt.scatter(data_cleaned[:,0],data_cleaned[:,2],c=clusters_gmm)
plt.xlabel("sig_0")
plt.ylabel("SSD")
plt.show()
plt.scatter(data_cleaned[:,1],data_cleaned[:,2],c=clusters_gmm)
plt.xlabel("PP")
plt.ylabel("SSD")
Text(0, 0.5, 'SSD')
Physical Waveform Alignment#
To compare waveforms on a common footing we can align them using the known orbit geometry. This physically-based approach was developed at the Alfred Wegener Institute (AWI).
# ============================================================
# Physical Waveform Alignment (AWI-style)
# ============================================================
from scipy.interpolate import interp1d
# --- Step 1: Read alignment variables from the NetCDF file ---
print("Reading alignment variables...")
tracker_range_all = unpack_gpod('tracker_range_20_ku')
altitude_all = unpack_gpod('alt_20_ku')
mss_all = unpack_gpod('mean_sea_surf_sol1_20_ku')
# Sum atmospheric and geophysical range corrections (1 Hz → 20 Hz).
# We use a dedicated interpolation that filters NaN before fitting,
# because unpack_gpod can fail on masked 1 Hz arrays in newer SciPy.
correction_names = [
'mod_dry_tropo_cor_zero_altitude_01',
'mod_wet_tropo_cor_zero_altitude_01',
'iono_cor_gim_01_ku',
'ocean_tide_sol1_01',
'load_tide_sol1_01',
'pole_tide_01',
'solid_earth_tide_01',
]
def safe_interp_1hz(var_name, n_20hz):
"""Read a 1 Hz variable and interpolate to 20 Hz, handling NaN."""
vals = np.array(SAR_data.variables[var_name][:], dtype=float)
if hasattr(vals, 'filled'):
vals = np.ma.filled(vals, np.nan)
time_1hz = np.array(SAR_data.variables['time_01'][:], dtype=float)
time_20hz = np.array(SAR_data.variables['time_20_ku'][:], dtype=float)
valid = ~np.isnan(vals)
if np.sum(valid) < 2:
return np.zeros(n_20hz)
f = interp1d(time_1hz[valid], vals[valid], kind='linear',
fill_value='extrapolate')
return f(time_20hz)
n_20hz = len(tracker_range_all)
total_correction_all = np.zeros(n_20hz)
for name in correction_names:
try:
total_correction_all += safe_interp_1hz(name, n_20hz)
except Exception as e:
print(f" Skipping {name}: {e}")
# --- Step 2: Apply the same filters used for waves_cleaned ---
# (find → NaN mask → sea-ice/lead flag filter)
_flag_filt = np.array(flag)[find][mask]
ice_lead_filt = (_flag_filt == 1) | (_flag_filt == 2)
tracker_range_c = tracker_range_all[find][mask][ice_lead_filt]
altitude_c = altitude_all[find][mask][ice_lead_filt]
mss_c = mss_all[find][mask][ice_lead_filt]
correction_c = total_correction_all[find][mask][ice_lead_filt]
# --- Step 3: Compute the alignment shift for each waveform ---
alignment_m = altitude_c - tracker_range_c - correction_c - mss_c
print(f"\nRaw alignment shifts ({len(alignment_m)} waveforms):")
print(f" Mean: {np.nanmean(alignment_m):.3f} m")
print(f" Std: {np.nanstd(alignment_m):.3f} m")
print(f" Range: [{np.nanmin(alignment_m):.3f}, {np.nanmax(alignment_m):.3f}] m")
# Clip outliers: shifts far from the bulk arise from poor MSS or
# correction data at high latitudes. Keep the central 98 %.
finite = np.isfinite(alignment_m)
p1, p99 = np.nanpercentile(alignment_m[finite], [1, 99])
outlier = (~finite) | (alignment_m < p1) | (alignment_m > p99)
alignment_m[outlier] = 0.0
# Remove the mean offset so we only correct for *differential* alignment.
# The mean shift is dominated by average freeboard / MSS bias, not by
# waveform-to-waveform tracker variation.
nonzero = alignment_m != 0
alignment_m[nonzero] -= np.mean(alignment_m[nonzero])
print(f"After clipping + de-meaning ({np.sum(outlier)} outliers zeroed):")
print(f" Std: {np.nanstd(alignment_m):.3f} m")
# --- Step 4: Define alignment helper functions ---
RANGE_GATE_RES = 0.2342 # metres per range bin (Sentinel-3 Ku-band)
def fft_oversample(waveform, factor):
"""Oversample a waveform using FFT zero-padding."""
n = len(waveform)
n_os = n * factor
ft = np.fft.fftshift(np.fft.fft(np.nan_to_num(waveform)))
pad = int(np.floor(n_os / 2 - n / 2))
ft_padded = np.concatenate([np.zeros(pad), ft, np.zeros(pad)])
return np.real(np.fft.ifft(np.fft.fftshift(ft_padded))) * n_os / n
def align_single_waveform(waveform, shift_m, n_bins, resolution, os_factor):
"""Shift a single waveform by shift_m metres via FFT oversampling."""
wf_os = fft_oversample(waveform, os_factor)
x_m = np.linspace(0, n_bins * resolution, len(wf_os), endpoint=False)
shifted = np.interp(x_m + shift_m, x_m, wf_os)
return shifted[::os_factor] # decimate back to original bins
# --- Step 5: Normalise and align all cleaned waveforms ---
n_bins = waves_cleaned.shape[1]
os_factor = int(np.ceil(RANGE_GATE_RES * 100)) # ~24x for ~1 cm resolution
# Per-waveform normalisation to [0, 1]
wf_max = np.nanmax(waves_cleaned, axis=1, keepdims=True).astype(float)
wf_max[wf_max == 0] = 1
waves_norm = waves_cleaned / wf_max
print(f"\nAligning {len(waves_norm)} waveforms (oversample x{os_factor}) ...")
waves_aligned = np.zeros_like(waves_norm)
for i in range(len(waves_norm)):
shift = alignment_m[i]
if np.isnan(shift):
shift = 0.0
waves_aligned[i] = align_single_waveform(
waves_norm[i], shift, n_bins, RANGE_GATE_RES, os_factor)
# Quick summary: peak-position improvement
peaks_before = np.argmax(waves_norm, axis=1)
peaks_after = np.argmax(waves_aligned, axis=1)
print(f"\nPeak position std: {np.std(peaks_before):.2f} -> {np.std(peaks_after):.2f} bins")
Reading alignment variables...
Raw alignment shifts (12195 waveforms):
Mean: 4.169 m
Std: 3.739 m
Range: [-27.545, 76.854] m
After clipping + de-meaning (2934 outliers zeroed):
Std: 1.897 m
Aligning 12195 waveforms (oversample x24) ...
Peak position std: 10.77 -> 8.19 bins
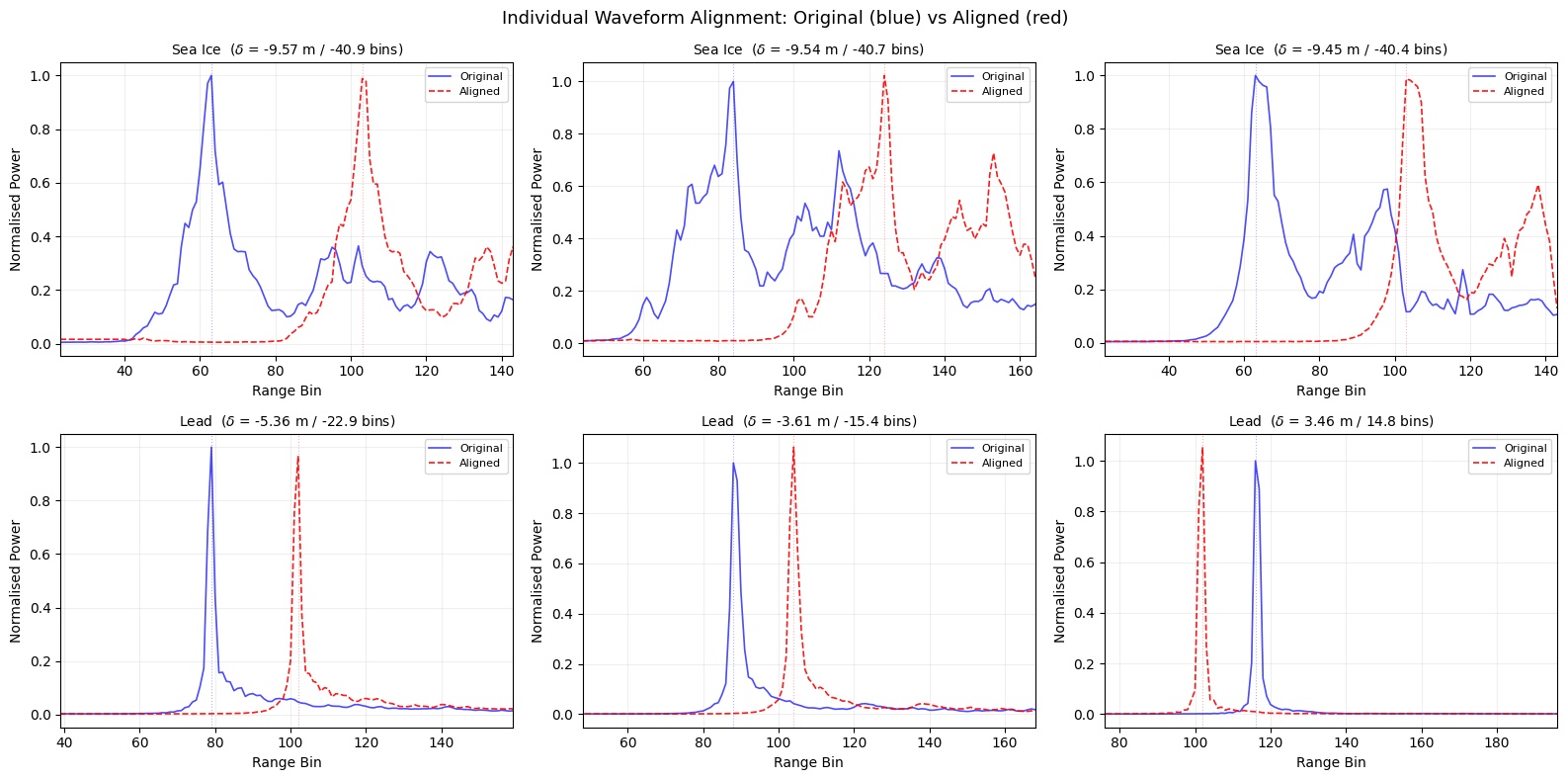
Effect of alignment on individual waveforms#
# ============================================================
# Individual waveform comparison: before vs after alignment
# ============================================================
abs_shifts = np.abs(alignment_m)
has_shift = np.isfinite(alignment_m) & (abs_shifts > 0)
# Pick the 3 sea-ice and 3 lead waveforms with the largest *finite* shifts
ice_valid = np.where((clusters_gmm == 0) & has_shift)[0]
lead_valid = np.where((clusters_gmm == 1) & has_shift)[0]
ice_top3 = ice_valid[np.argsort(abs_shifts[ice_valid])[::-1][:3]]
lead_top3 = lead_valid[np.argsort(abs_shifts[lead_valid])[::-1][:3]]
show_idx = np.concatenate([ice_top3, lead_top3])
fig, axes = plt.subplots(2, 3, figsize=(16, 8))
x = np.arange(n_bins)
for i, idx in enumerate(show_idx):
ax = axes[i // 3, i % 3]
ax.plot(x, waves_norm[idx], 'b-', alpha=0.7, linewidth=1.2, label='Original')
ax.plot(x, waves_aligned[idx], 'r--', alpha=0.9, linewidth=1.2, label='Aligned')
# Mark peak positions
pk_orig = np.argmax(waves_norm[idx])
pk_align = np.argmax(waves_aligned[idx])
ax.axvline(pk_orig, color='blue', alpha=0.3, linewidth=0.8, linestyle=':')
ax.axvline(pk_align, color='red', alpha=0.3, linewidth=0.8, linestyle=':')
cls_name = 'Sea Ice' if clusters_gmm[idx] == 0 else 'Lead'
shift_val = alignment_m[idx]
shift_bins = shift_val / RANGE_GATE_RES
ax.set_title(f'{cls_name} ($\delta$ = {shift_val:.2f} m / {shift_bins:.1f} bins)',
fontsize=10)
ax.set_xlabel('Range Bin')
ax.set_ylabel('Normalised Power')
ax.legend(fontsize=8, loc='upper right')
ax.grid(True, alpha=0.2)
# Zoom to the leading-edge region for clarity
ax.set_xlim(max(0, pk_orig - 40), min(n_bins, pk_orig + 80))
plt.suptitle('Individual Waveform Alignment: Original (blue) vs Aligned (red)',
fontsize=13)
plt.tight_layout()
plt.show()
<>:33: SyntaxWarning: invalid escape sequence '\d'
<>:33: SyntaxWarning: invalid escape sequence '\d'
/tmp/ipython-input-3333233364.py:33: SyntaxWarning: invalid escape sequence '\d'
ax.set_title(f'{cls_name} ($\delta$ = {shift_val:.2f} m / {shift_bins:.1f} bins)',
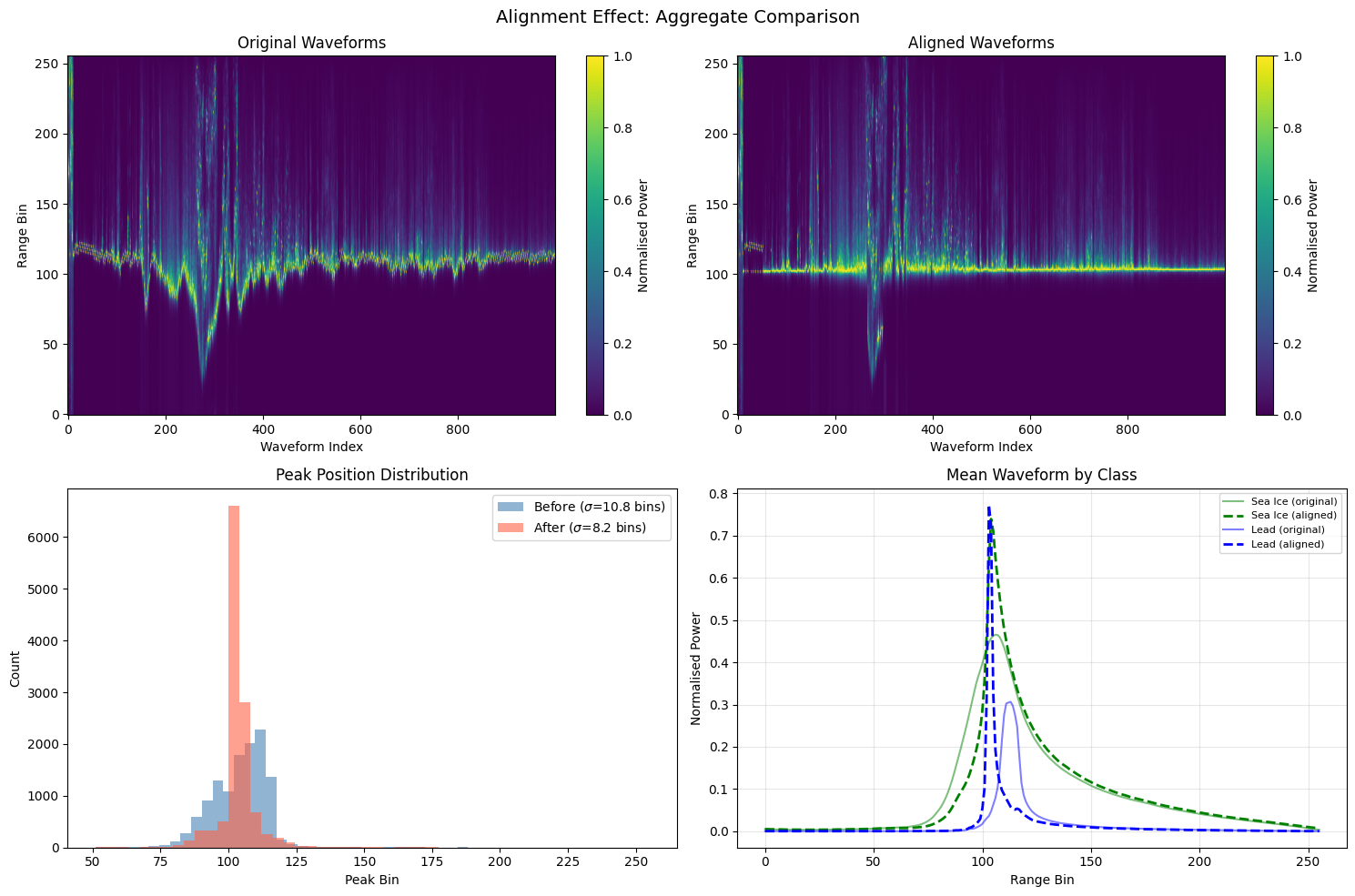
Aggregate alignment comparison#
The figure below summarises the alignment effect across all waveforms:
Top row — Echogram before and after alignment. A tighter bright band indicates better alignment.
Bottom left — histogram of peak positions. The aligned distribution (red) should be narrower.
Bottom right — mean waveform per class. After alignment the mean leading edge becomes sharper because individual waveforms are better registered.
# ============================================================
# Aggregate alignment comparison
# ============================================================
fig, axes = plt.subplots(2, 2, figsize=(15, 10))
n_img = min(1000, len(waves_norm))
# --- Top left: original waveform image ---
ax = axes[0, 0]
im = ax.imshow(waves_norm[:n_img].T, origin='lower', aspect='auto',
cmap='viridis', vmin=0, vmax=1)
ax.set_title('Original Waveforms')
ax.set_xlabel('Waveform Index')
ax.set_ylabel('Range Bin')
plt.colorbar(im, ax=ax, label='Normalised Power')
# --- Top right: aligned waveform image ---
ax = axes[0, 1]
im = ax.imshow(waves_aligned[:n_img].T, origin='lower', aspect='auto',
cmap='viridis', vmin=0, vmax=1)
ax.set_title('Aligned Waveforms')
ax.set_xlabel('Waveform Index')
ax.set_ylabel('Range Bin')
plt.colorbar(im, ax=ax, label='Normalised Power')
# --- Bottom left: peak position histograms ---
ax = axes[1, 0]
ax.hist(peaks_before, bins=50, alpha=0.6, color='steelblue',
label=f'Before ($\sigma$={np.std(peaks_before):.1f} bins)')
ax.hist(peaks_after, bins=50, alpha=0.6, color='tomato',
label=f'After ($\sigma$={np.std(peaks_after):.1f} bins)')
ax.set_xlabel('Peak Bin')
ax.set_ylabel('Count')
ax.set_title('Peak Position Distribution')
ax.legend()
# --- Bottom right: mean waveform by class, before vs after ---
ax = axes[1, 1]
xr = np.arange(n_bins)
for cls, name, color in [(0, 'Sea Ice', 'green'), (1, 'Lead', 'blue')]:
cls_mask = clusters_gmm == cls
if np.sum(cls_mask) < 5:
continue
ax.plot(xr, np.nanmean(waves_norm[cls_mask], axis=0),
color=color, linestyle='-', alpha=0.5, label=f'{name} (original)')
ax.plot(xr, np.nanmean(waves_aligned[cls_mask], axis=0),
color=color, linestyle='--', linewidth=2, label=f'{name} (aligned)')
ax.set_xlabel('Range Bin')
ax.set_ylabel('Normalised Power')
ax.set_title('Mean Waveform by Class')
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3)
plt.suptitle('Alignment Effect: Aggregate Comparison', fontsize=14)
plt.tight_layout()
plt.show()
<>:29: SyntaxWarning: invalid escape sequence '\s'
<>:31: SyntaxWarning: invalid escape sequence '\s'
<>:29: SyntaxWarning: invalid escape sequence '\s'
<>:31: SyntaxWarning: invalid escape sequence '\s'
/tmp/ipython-input-479174154.py:29: SyntaxWarning: invalid escape sequence '\s'
label=f'Before ($\sigma$={np.std(peaks_before):.1f} bins)')
/tmp/ipython-input-479174154.py:31: SyntaxWarning: invalid escape sequence '\s'
label=f'After ($\sigma$={np.std(peaks_after):.1f} bins)')
Compare with ESA data#
In the ESA dataset, sea ice = 1 and lead = 2. Therefore, we need to subtract 1 from it so our predicted labels are comparable with the official product labels.
flag_cleaned_modified = flag_cleaned - 1
from sklearn.metrics import confusion_matrix, classification_report
true_labels = flag_cleaned_modified # true labels from the ESA dataset
predicted_gmm = clusters_gmm # predicted labels from GMM method
# Compute confusion matrix
conf_matrix = confusion_matrix(true_labels, predicted_gmm)
# Print confusion matrix
print("Confusion Matrix:")
print(conf_matrix)
# Compute classification report
class_report = classification_report(true_labels, predicted_gmm)
# Print classification report
print("\nClassification Report:")
print(class_report)
Confusion Matrix:
[[8856 22]
[ 24 3293]]
Classification Report:
precision recall f1-score support
0.0 1.00 1.00 1.00 8878
1.0 0.99 0.99 0.99 3317
accuracy 1.00 12195
macro avg 1.00 1.00 1.00 12195
weighted avg 1.00 1.00 1.00 12195