Images alignment on S3/S2#
This notebook presents some examples of imagery alignment techniques introduced in the previous notebook on the real-life example of aligning Sentinel-2 and Sentinel-3 OLCI imagery.
Load in data needed#
from google.colab import drive
drive.mount('/content/drive')
Mounted at /content/drive
import numpy as np
import matplotlib.pyplot as plt
save_path = '/content/drive/MyDrive/GEOL0069/2425/Week 5/Regression_application'
s2_data = np.load(save_path+'/s2_zoomed_data.npz')
s2_x = s2_data['x']
s2_y = s2_data['y']
s2_band_data = s2_data['band_data']
s3_data = np.load(save_path+'/s3_zoomed_data.npz')
s3_x = s3_data['x']
s3_y = s3_data['y']
s3_reflectance = s3_data['reflectance']
You don’t need to run this cell. This cell mainly interpolates the loaded S3/S2 scene to a common grid for alignment.
import numpy as np
from scipy.interpolate import griddata
def process_and_save_data(
x_s2, y_s2, s2_band_data, s2_band_index,
x_s3, y_s3, s3_reflectance, s3_band_index,
ngrid=400, out_file='interpolated_data.npz'
):
# Pick single band
s2_vals = s2_band_data[:, s2_band_index]
s3_vals = s3_reflectance[:, s3_band_index]
x_min = min(x_s3.min(), x_s2.min())
x_max = max(x_s3.max(), x_s2.max())
y_min = min(y_s3.min(), y_s2.min())
y_max = max(y_s3.max(), y_s2.max())
x_grid = np.linspace(x_min, x_max, ngrid)
y_grid = np.linspace(y_min, y_max, ngrid)
xg, yg = np.meshgrid(x_grid, y_grid)
z_s2 = griddata((x_s2, y_s2), s2_vals, (xg, yg), method='cubic')
z_s3 = griddata((x_s3, y_s3), s3_vals, (xg, yg), method='cubic')
np.savez_compressed(out_file, xg=xg, yg=yg, z_s2=z_s2, z_s3=z_s3)
print(f"Saved precomputed arrays to '{out_file}'")
process_and_save_data(
s2_x, s2_y, s2_band_data, 0,
s3_x, s3_y, s3_reflectance, 0,
ngrid=400,
out_file='/content/drive/MyDrive/GEOL0069/2324/Week 6 2025/interpolated_data.npz'
)
def load_precomputed_data(file='interpolated_data.npz'):
data = np.load(file)
xg = data['xg']
yg = data['yg']
z_s2 = data['z_s2']
z_s3 = data['z_s3']
print(f"Loaded arrays from '{file}' (shapes: {z_s2.shape}, {z_s3.shape})")
return xg, yg, z_s2, z_s3
xg, yg, z_s2, z_s3 = load_precomputed_data('/content/drive/MyDrive/PhD Year 3/GEOL0069_test_2026/Week 6/interpolated_data.npz')
Loaded arrays from '/content/drive/MyDrive/PhD Year 3/GEOL0069_test_2026/Week 6/interpolated_data.npz' (shapes: (400, 400), (400, 400))
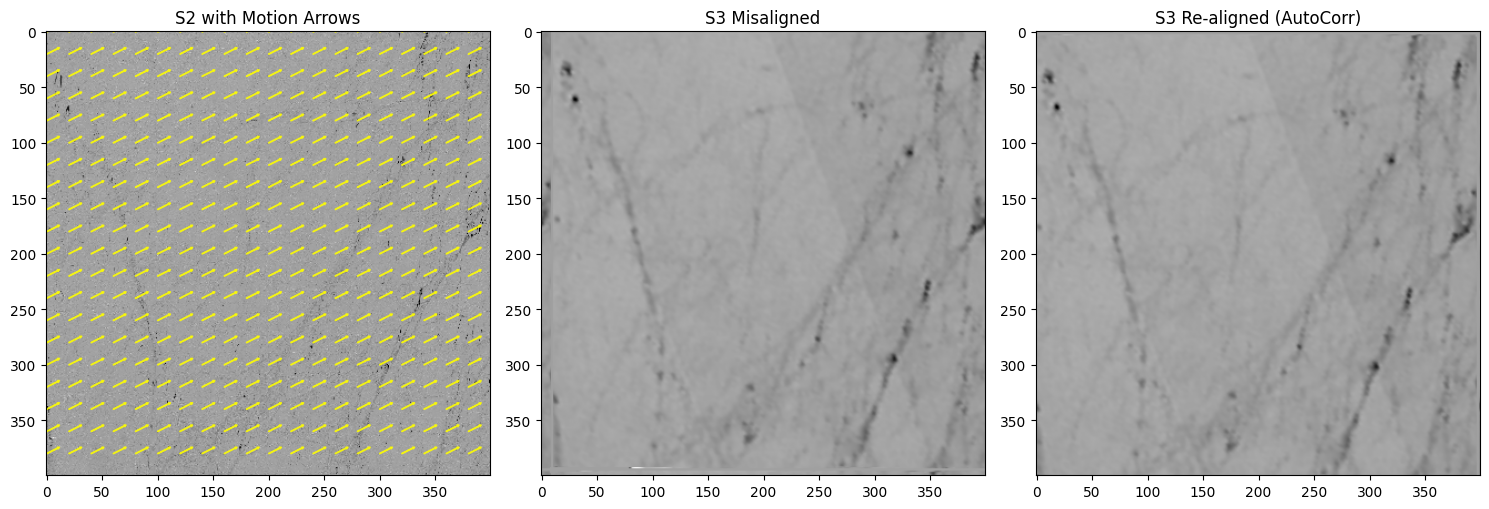
Auto-correlation#
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.patches import FancyArrow
from scipy.signal import correlate2d
def auto_corr_demo_with_arrows(
z_s2, z_s3,
manual_dx=15,
manual_dy=-7,
step=20
):
A = np.nan_to_num(z_s2, nan=np.nanmean(z_s2))
B = np.nan_to_num(z_s3, nan=np.nanmean(z_s3))
B_misaligned = np.roll(np.roll(B, manual_dy, axis=0), manual_dx, axis=1)
corr = correlate2d(A, B_misaligned, mode='same', boundary='wrap')
peak_y, peak_x = np.unravel_index(np.argmax(corr), corr.shape)
shift_x_btoa = peak_x - B_misaligned.shape[1]//2
shift_y_btoa = peak_y - B_misaligned.shape[0]//2
dx_est = -shift_x_btoa
dy_est = -shift_y_btoa
print(f"[AutoCorr] Manual shift=({manual_dx},{manual_dy}), Recovered=({dx_est},{dy_est})")
B_realigned = np.roll(np.roll(B_misaligned, shift_y_btoa, axis=0),
shift_x_btoa, axis=1)
fig, (axA, axB, axC) = plt.subplots(1, 3, figsize=(15, 5))
axA.imshow(A, cmap='gray')
axA.set_title("S2 with Motion Arrows")
h, w = A.shape
rows = np.arange(0, h, step)
cols = np.arange(0, w, step)
for r in rows:
for c in cols:
axA.add_patch(FancyArrow(c, r, manual_dx, manual_dy, color="yellow",
width=0.5, head_width=2, head_length=2, alpha=0.8))
axB.imshow(B_misaligned, cmap='gray')
axB.set_title("S3 Misaligned")
axC.imshow(B_realigned, cmap='gray')
axC.set_title("S3 Re-aligned (AutoCorr)")
plt.tight_layout()
plt.show()
# Example usage:
auto_corr_demo_with_arrows(z_s2, z_s3, manual_dx=10, manual_dy=-5, step=20)
[AutoCorr] Manual shift=(10,-5), Recovered=(12,-7)
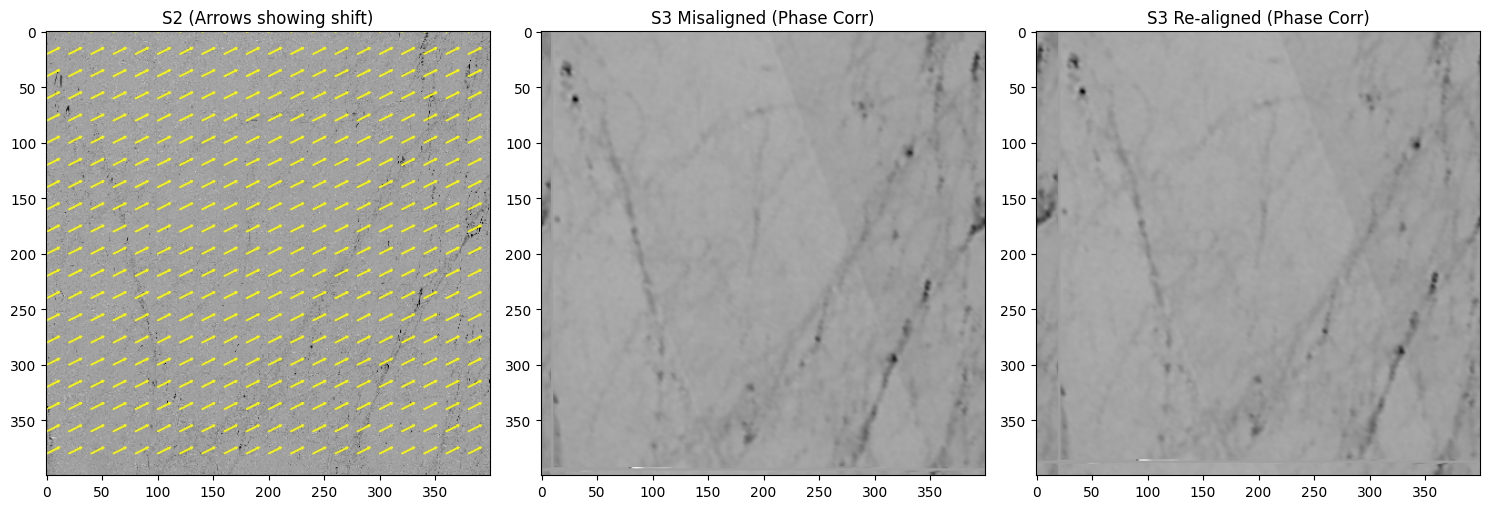
Phase correlation#
from skimage.registration import phase_cross_correlation
def phase_corr_demo_with_arrows(
z_s2, z_s3,
manual_dx=15,
manual_dy=-7,
step=20
):
A = np.nan_to_num(z_s2, nan=np.nanmean(z_s2))
B = np.nan_to_num(z_s3, nan=np.nanmean(z_s3))
B_misaligned = np.roll(np.roll(B, manual_dy, axis=0), manual_dx, axis=1)
shift, error, diffphase = phase_cross_correlation(A, B_misaligned)
dy_est, dx_est = shift
dx_est, dy_est = -dx_est, -dy_est
print(f"[PhaseCorr] Manual shift=({manual_dx},{manual_dy}), Recovered=({dx_est:.2f},{dy_est:.2f})")
B_realigned = np.roll(np.roll(B_misaligned, int(dy_est), axis=0),
int(dx_est), axis=1)
fig, (axA, axB, axC) = plt.subplots(1,3, figsize=(15,5))
axA.imshow(A, cmap='gray')
axA.set_title(f"S2 (Arrows showing shift)")
h, w = A.shape
rows = np.arange(0, h, step)
cols = np.arange(0, w, step)
for r in rows:
for c in cols:
axA.add_patch(FancyArrow(c, r, manual_dx, manual_dy, color="yellow",
width=0.5, head_width=2, head_length=2, alpha=0.8))
axB.imshow(B_misaligned, cmap='gray')
axB.set_title("S3 Misaligned (Phase Corr)")
axC.imshow(B_realigned, cmap='gray')
axC.set_title("S3 Re-aligned (Phase Corr)")
plt.tight_layout()
plt.show()
phase_corr_demo_with_arrows(z_s2, z_s3, manual_dx=10, manual_dy=-5, step=20)
[PhaseCorr] Manual shift=(10,-5), Recovered=(11.00,-7.00)
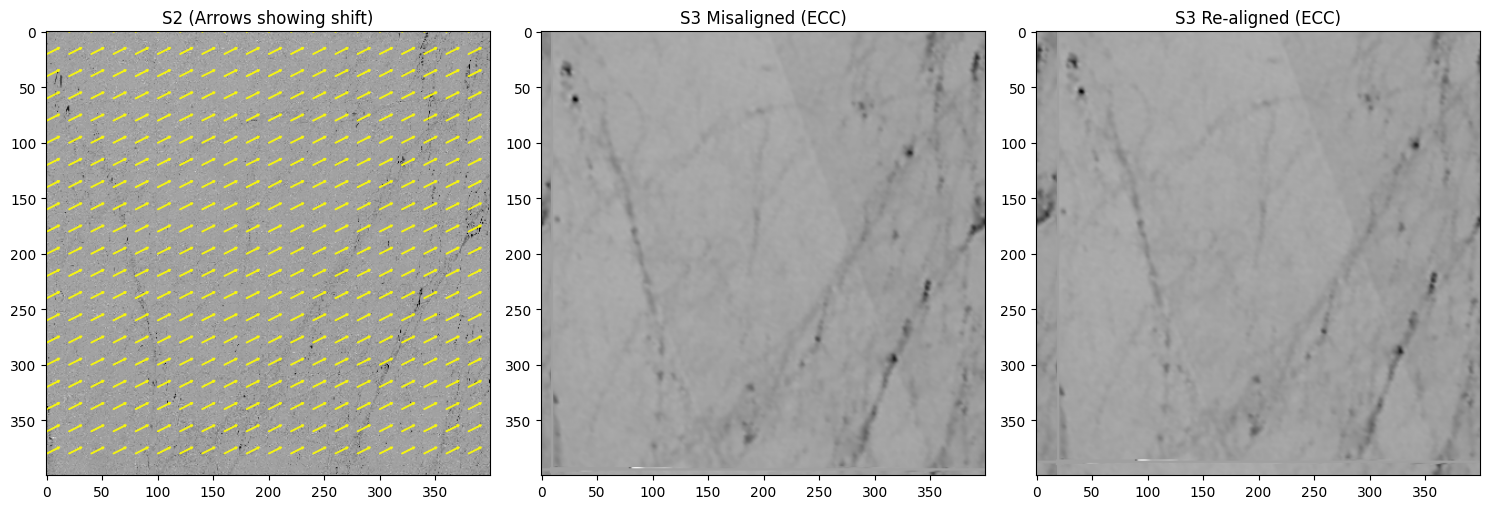
ECC (Enhanced Correlation Coefficient) Alignment#
import cv2
def ecc_demo_with_arrows(
z_s2, z_s3,
manual_dx=15,
manual_dy=-7,
step=20,
iterations=200,
eps=1e-6
):
A = np.nan_to_num(z_s2, nan=np.nanmean(z_s2)).astype(np.float32)
B = np.nan_to_num(z_s3, nan=np.nanmean(z_s3)).astype(np.float32)
B_misaligned = np.roll(np.roll(B, manual_dy, axis=0), manual_dx, axis=1)
warp_matrix = np.eye(2, 3, dtype=np.float32)
criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, iterations, eps)
try:
cc, warp_matrix = cv2.findTransformECC(A, B_misaligned, warp_matrix, motionType=cv2.MOTION_TRANSLATION, criteria=criteria)
dx_est, dy_est = warp_matrix[0,2], warp_matrix[1,2]
print(f"[ECC] Manual shift=({manual_dx},{manual_dy}), Recovered=({dx_est:.2f},{dy_est:.2f}), CC={cc:.4f}")
except cv2.error as e:
print("[ECC Failed]", e)
dx_est, dy_est = None, None
B_realigned = np.roll(np.roll(B_misaligned, int(dy_est), axis=0),
int(dx_est), axis=1)
fig, (axA, axB, axC) = plt.subplots(1,3, figsize=(15,5))
axA.imshow(A, cmap='gray')
axA.set_title(f"S2 (Arrows showing shift)")
h, w = A.shape
rows = np.arange(0, h, step)
cols = np.arange(0, w, step)
for r in rows:
for c in cols:
axA.add_patch(FancyArrow(c, r, manual_dx, manual_dy, color="yellow",
width=0.5, head_width=2, head_length=2, alpha=0.8))
axB.imshow(B_misaligned, cmap='gray')
axB.set_title("S3 Misaligned (ECC)")
axC.imshow(B_realigned, cmap='gray')
axC.set_title("S3 Re-aligned (ECC)")
plt.tight_layout()
plt.show()
ecc_demo_with_arrows(z_s2, z_s3, manual_dx=10, manual_dy=-5, step=20)
[ECC] Manual shift=(10,-5), Recovered=(10.94,-7.87), CC=0.7336
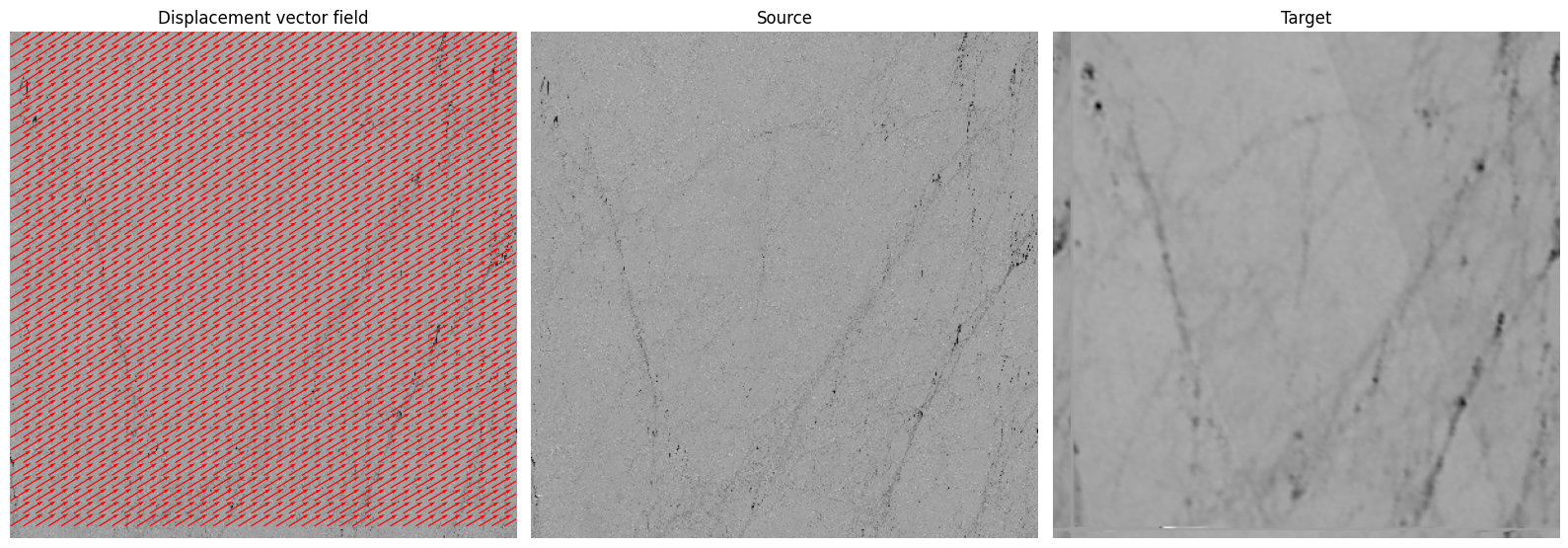
Sea-Raft#
# Install required deep learning, image processing, and visualization libraries
!pip install torch torchvision opencv-python matplotlib
# OS utilities (file system checks, paths)
import os
# System utilities (used to modify Python path)
import sys
# Deep learning framework
import torch
# Numerical computations
import numpy as np
# Computer vision library
import cv2
# Visualization
import matplotlib.pyplot as plt
# Image loading / manipulation
from PIL import Image
# Download SEA-RAFT if it is not already available
if not os.path.exists("SEA-RAFT"):
!git clone https://github.com/princeton-vl/SEA-RAFT.git
else:
print("SEA-RAFT folder exists — skipping clone")
# Simple container for configuration objects
from types import SimpleNamespace
# Allows Python to find RAFT modules inside the repository
sys.path.append("SEA-RAFT/core")
# Main RAFT model class
from raft import RAFT
# Utility for padding images to dimensions compatible with the network
from utils.utils import InputPadder
Requirement already satisfied: torch in /usr/local/lib/python3.12/dist-packages (2.10.0+cu128)
Requirement already satisfied: torchvision in /usr/local/lib/python3.12/dist-packages (0.25.0+cu128)
Requirement already satisfied: opencv-python in /usr/local/lib/python3.12/dist-packages (4.13.0.92)
Requirement already satisfied: matplotlib in /usr/local/lib/python3.12/dist-packages (3.10.0)
Requirement already satisfied: filelock in /usr/local/lib/python3.12/dist-packages (from torch) (3.24.2)
Requirement already satisfied: typing-extensions>=4.10.0 in /usr/local/lib/python3.12/dist-packages (from torch) (4.15.0)
Requirement already satisfied: setuptools in /usr/local/lib/python3.12/dist-packages (from torch) (75.2.0)
Requirement already satisfied: sympy>=1.13.3 in /usr/local/lib/python3.12/dist-packages (from torch) (1.14.0)
Requirement already satisfied: networkx>=2.5.1 in /usr/local/lib/python3.12/dist-packages (from torch) (3.6.1)
Requirement already satisfied: jinja2 in /usr/local/lib/python3.12/dist-packages (from torch) (3.1.6)
Requirement already satisfied: fsspec>=0.8.5 in /usr/local/lib/python3.12/dist-packages (from torch) (2025.3.0)
Requirement already satisfied: cuda-bindings==12.9.4 in /usr/local/lib/python3.12/dist-packages (from torch) (12.9.4)
Requirement already satisfied: nvidia-cuda-nvrtc-cu12==12.8.93 in /usr/local/lib/python3.12/dist-packages (from torch) (12.8.93)
Requirement already satisfied: nvidia-cuda-runtime-cu12==12.8.90 in /usr/local/lib/python3.12/dist-packages (from torch) (12.8.90)
Requirement already satisfied: nvidia-cuda-cupti-cu12==12.8.90 in /usr/local/lib/python3.12/dist-packages (from torch) (12.8.90)
Requirement already satisfied: nvidia-cudnn-cu12==9.10.2.21 in /usr/local/lib/python3.12/dist-packages (from torch) (9.10.2.21)
Requirement already satisfied: nvidia-cublas-cu12==12.8.4.1 in /usr/local/lib/python3.12/dist-packages (from torch) (12.8.4.1)
Requirement already satisfied: nvidia-cufft-cu12==11.3.3.83 in /usr/local/lib/python3.12/dist-packages (from torch) (11.3.3.83)
Requirement already satisfied: nvidia-curand-cu12==10.3.9.90 in /usr/local/lib/python3.12/dist-packages (from torch) (10.3.9.90)
Requirement already satisfied: nvidia-cusolver-cu12==11.7.3.90 in /usr/local/lib/python3.12/dist-packages (from torch) (11.7.3.90)
Requirement already satisfied: nvidia-cusparse-cu12==12.5.8.93 in /usr/local/lib/python3.12/dist-packages (from torch) (12.5.8.93)
Requirement already satisfied: nvidia-cusparselt-cu12==0.7.1 in /usr/local/lib/python3.12/dist-packages (from torch) (0.7.1)
Requirement already satisfied: nvidia-nccl-cu12==2.27.5 in /usr/local/lib/python3.12/dist-packages (from torch) (2.27.5)
Requirement already satisfied: nvidia-nvshmem-cu12==3.4.5 in /usr/local/lib/python3.12/dist-packages (from torch) (3.4.5)
Requirement already satisfied: nvidia-nvtx-cu12==12.8.90 in /usr/local/lib/python3.12/dist-packages (from torch) (12.8.90)
Requirement already satisfied: nvidia-nvjitlink-cu12==12.8.93 in /usr/local/lib/python3.12/dist-packages (from torch) (12.8.93)
Requirement already satisfied: nvidia-cufile-cu12==1.13.1.3 in /usr/local/lib/python3.12/dist-packages (from torch) (1.13.1.3)
Requirement already satisfied: triton==3.6.0 in /usr/local/lib/python3.12/dist-packages (from torch) (3.6.0)
Requirement already satisfied: cuda-pathfinder~=1.1 in /usr/local/lib/python3.12/dist-packages (from cuda-bindings==12.9.4->torch) (1.3.4)
Requirement already satisfied: numpy in /usr/local/lib/python3.12/dist-packages (from torchvision) (2.0.2)
Requirement already satisfied: pillow!=8.3.*,>=5.3.0 in /usr/local/lib/python3.12/dist-packages (from torchvision) (11.3.0)
Requirement already satisfied: contourpy>=1.0.1 in /usr/local/lib/python3.12/dist-packages (from matplotlib) (1.3.3)
Requirement already satisfied: cycler>=0.10 in /usr/local/lib/python3.12/dist-packages (from matplotlib) (0.12.1)
Requirement already satisfied: fonttools>=4.22.0 in /usr/local/lib/python3.12/dist-packages (from matplotlib) (4.61.1)
Requirement already satisfied: kiwisolver>=1.3.1 in /usr/local/lib/python3.12/dist-packages (from matplotlib) (1.4.9)
Requirement already satisfied: packaging>=20.0 in /usr/local/lib/python3.12/dist-packages (from matplotlib) (26.0)
Requirement already satisfied: pyparsing>=2.3.1 in /usr/local/lib/python3.12/dist-packages (from matplotlib) (3.3.2)
Requirement already satisfied: python-dateutil>=2.7 in /usr/local/lib/python3.12/dist-packages (from matplotlib) (2.9.0.post0)
Requirement already satisfied: six>=1.5 in /usr/local/lib/python3.12/dist-packages (from python-dateutil>=2.7->matplotlib) (1.17.0)
Requirement already satisfied: mpmath<1.4,>=1.1.0 in /usr/local/lib/python3.12/dist-packages (from sympy>=1.13.3->torch) (1.3.0)
Requirement already satisfied: MarkupSafe>=2.0 in /usr/local/lib/python3.12/dist-packages (from jinja2->torch) (3.0.3)
Cloning into 'SEA-RAFT'...
remote: Enumerating objects: 115, done.
remote: Counting objects: 100% (40/40), done.
remote: Compressing objects: 100% (18/18), done.
remote: Total 115 (delta 28), reused 22 (delta 22), pack-reused 75 (from 1)
Receiving objects: 100% (115/115), 8.16 MiB | 17.49 MiB/s, done.
Resolving deltas: 100% (51/51), done.
def grayscale_to_rgb(img, normalize=True):
"""
Convert a single-channel grayscale image to a 3-channel RGB image.
SEA‑RAFT expects RGB images as input.
This function converts a grayscale image
to RGB by replicating the grayscale channel across the three RGB channels.
Parameters
----------
img : np.ndarray
Input grayscale image of shape (H, W).
normalize : bool, optional (default=True)
If True, the image will be normalized to the [0, 255] range.
For real data, additional preprocessing (e.g., contrast enhancement)
may be required.
Returns
-------
rgb_img : np.ndarray
RGB image of shape (H, W, 3), dtype=np.uint8.
"""
if img.ndim != 2:
raise ValueError("Input image must be single-channel (H, W)")
img_out = img.copy()
if normalize:
img_min, img_max = img_out.min(), img_out.max()
if img_max > img_min:
img_out = (img_out - img_min) / (img_max - img_min)
img_out = (img_out * 255).astype(np.uint8)
else:
img_out = img_out.astype(np.uint8)
# Stack into 3 identical channels
rgb_img = np.stack([img_out, img_out, img_out], axis=-1)
return rgb_img
def sea_raft_flow(img1, img2, model_path=None, device='cpu'):
"""
Estimate dense optical flow (displacement field) between two RGB images using SEA‑RAFT.
Parameters
----------
img1 : np.ndarray
Source RGB image of shape (H, W, 3), dtype=np.uint8 or float.
img2 : np.ndarray
Target RGB image of shape (H, W, 3), dtype=np.uint8 or float.
model_path : str, optional
Path to pre-trained SEA‑RAFT weights. If None, defaults to the standard model path.
device : str, optional
Device to run the model on ('cpu' or 'cuda').
Returns
-------
u_disp : np.ndarray
Horizontal displacement (dx) for each pixel, shape (H, W).
v_disp : np.ndarray
Vertical displacement (dy) for each pixel, shape (H, W).
"""
# Default dictionary storing standard SEARaft parameters/arguments
args_dict = {
"name": "spring-M",
"dataset": "spring",
"gpus": [0,1,2,3,4,5,6,7],
"use_var": True,
"var_min": 0,
"var_max": 10,
"pretrain": "resnet34",
"initial_dim": 64,
"block_dims": [64,128,256],
"radius": 4,
"dim": 128,
"num_blocks": 2,
"iters": 4,
"image_size": [540,960],
"scale": -1,
"batch_size": 32,
"epsilon": 1e-08,
"lr": 0.0004,
"wdecay": 1e-05,
"dropout": 0,
"clip": 1.0,
"gamma": 0.85,
"num_steps": 120000,
"restore_ckpt": None,
"coarse_config": None,
"cfg": "SEA-RAFT/config/eval/spring-M.json",
"path": "/content/drive/MyDrive/PhD Year 3/GEOL0069_test_2026/Week 6/Tartan-C-T-TSKH-spring540x960-M.pth",
"url": None,
"device": device
}
# Convert the dictionary to an arg namespace (compatibility)
args = SimpleNamespace(**args_dict)
# Instantiate the RAFT model
model = RAFT(args)
model_path = args.path
if model_path:
model.load_state_dict(torch.load(model_path,map_location=torch.device(device)))
model.to(device)
model.eval()
# Convert input images to tensors
img1_t = torch.from_numpy(img1).permute(2,0,1).float()[None].to(device)
img2_t = torch.from_numpy(img2).permute(2,0,1).float()[None].to(device)
# Pad to multiple of 8 (constraint related to the architecture design)
padder = InputPadder(img1_t.shape)
img1_t, img2_t = padder.pad(img1_t, img2_t)
# Evaluation
with torch.no_grad():
outputs = model(img1_t, img2_t, iters=20, test_mode=True)
flow = outputs['flow'][-1] # last iteration
# Extract the horizontal and vertical flow (displacement) dx, dy
flow = flow.squeeze(0) # remove batch -> shape (2, H, W)
flow = flow.permute(1,2,0) # (H, W, 2)
u_disp = flow[...,0].cpu().numpy() # horizontal
v_disp = flow[...,1].cpu().numpy() # vertical
return u_disp, v_disp
A = np.nan_to_num(z_s2, nan=np.nanmean(z_s2))
B = np.nan_to_num(z_s3, nan=np.nanmean(z_s3))
manual_dx=15
manual_dy=-7,
B_misaligned = np.roll(np.roll(B, manual_dy, axis=0), manual_dx, axis=1)
A = grayscale_to_rgb(A)
B_misaligned = grayscale_to_rgb(B_misaligned)
dx_raft_AB, dy_raft_AB = sea_raft_flow(A, B_misaligned, model_path=None)
# Display
skip=10
fig, axes = plt.subplots(1, 3, figsize=(16,8))
h1, w1 = dx_raft_AB.shape
Y1, X1 = np.mgrid[0:h1, 0:w1]
axes[0].imshow(A)
axes[0].quiver(X1[::skip, ::skip], Y1[::skip, ::skip],
dx_raft_AB[::skip, ::skip], dy_raft_AB[::skip, ::skip],
angles='xy', scale_units='xy', scale=1, color='red'
)
axes[0].set_title("Displacement vector field")
axes[0].axis('off')
#######
h2, w2 = dx_raft_AB.shape
Y2, X2 = np.mgrid[0:h2, 0:w2]
axes[1].imshow(A)
axes[1].set_title("Source")
axes[1].axis('off')
#######
h3, w3 = dx_raft_AB.shape
Y3, X3 = np.mgrid[0:h3, 0:w3]
axes[2].imshow(B_misaligned)
axes[2].set_title("Target")
axes[2].axis('off')
plt.tight_layout()
plt.show()
/usr/local/lib/python3.12/dist-packages/torch/functional.py:505: UserWarning: torch.meshgrid: in an upcoming release, it will be required to pass the indexing argument. (Triggered internally at /pytorch/aten/src/ATen/native/TensorShape.cpp:4381.)
return _VF.meshgrid(tensors, **kwargs) # type: ignore[attr-defined]